
system załadunku i rozładunku worków samochodowych
System załadunku i rozładunku worków na ciężarówce jest jednym z internetowych systemów załadunku ciężarówek z wykorzystaniem ramienia robota. Branże, w których się znajdujemy:
1. Cement/materiały budowlane: worki cementu 50 kg, robot 6-osiowy o dużym udźwigu + przyssawka próżniowa, 600–2000 worków/godzinę
2. Nawóz/pasza: worki 25 kg–40 kg, robot o średnim załadunku + chwytak
3. Żywność/napoje/w pudełkach, butelkach: robot BLMC + chwytak
4. Worki chemiczne/plastikowe/tonowe, beczki: robot bramowy o dużej wytrzymałości + zawiesie
5. System załadunku i rozładunku worków z solą przemysłową
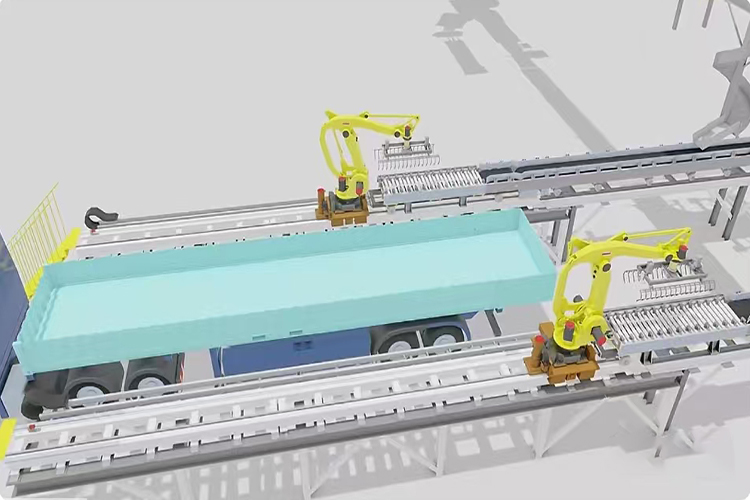
System załadunku z wykorzystaniem ramienia robota to zautomatyzowane urządzenie logistyczne, które wykorzystuje roboty przemysłowe, inteligentne systemy wizyjne i przenośniki, aby zapewnić wydajne i precyzyjne operacje załadunku. Jest szeroko stosowany w takich branżach jak cementownia, nawozy, pasze, żywność i chemikalia, a szczególnie nadaje się do załadunku towarów w workach, pudełkach lub o regularnych kształtach.
I. Skład systemu
(1) Ramię robota (robot przemysłowy)
Typ: Najczęściej wykorzystuje się robota z 4-osiowymi stawami (takiego jak BS-180-3100) (scenariusz pracy z dużą prędkością i małym obciążeniem).
Ładunek: Wybierz w zależności od ciężaru towaru (na przykład worki z cementem ważą zwykle 50 kg/worek, a wymagany jest robot o udźwigu ≥120 kg).
Efektor końcowy:
Przyssawka próżniowa: odpowiednia do materiałów pakowanych w płaskie worki (np. cement, mąka).
Chwytak/zacisk: stosowany do przedmiotów w pudełkach lub o nieregularnych kształtach.
Urządzenie przyssawkowe magnetyczne: scenariusz opakowania metalowego.
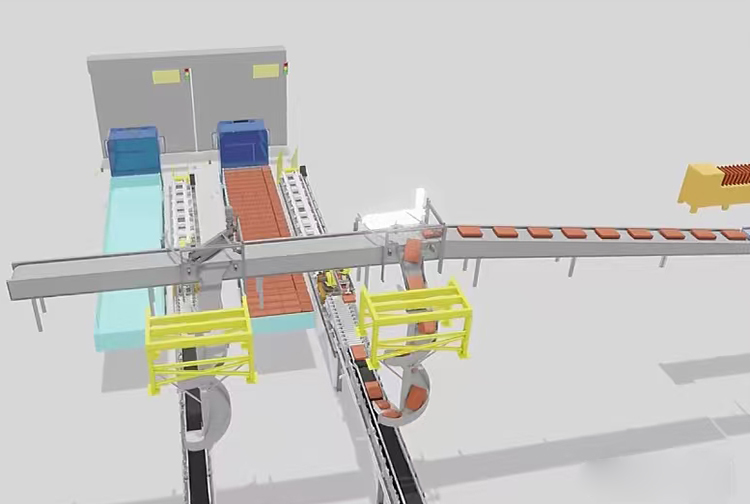
2) System transportu
Przenośnik podający: przenośnik taśmowy, rolkowy lub łańcuchowy, który transportuje towar do obszaru roboczego ramienia robota.
Sortownik (opcjonalnie): sortuje różne rodzaje towarów.
Moduł ważenia/kontroli: zapewnia, że waga i wygląd każdej sztuki ładunku są mierzone.
(3) System pozycjonowania wizualnego
Kamera 3D/skaner laserowy: identyfikuje rozmiar wagonu, stan ułożenia ładunku i położenie pojazdu.
Algorytm: generuje optymalną ścieżkę układania poprzez analizę chmury punktów i obsługuje dynamiczne dostosowania (takie jak ruch pojazdu lub przesunięcie ładunku).
(4) Układ sterowania
PLC (Siemens, Mitsubishi): koordynuje ramię robota, taśmociąg i czujnik.
Interfejs człowiek-maszyna (HMI): zapewnia panel operacyjny i obsługuje przełączanie trybu ręcznego/automatycznego.
Dokowanie danych: możliwość podłączenia do WMS (systemu zarządzania magazynem) lub TMS (systemu zarządzania transportem).
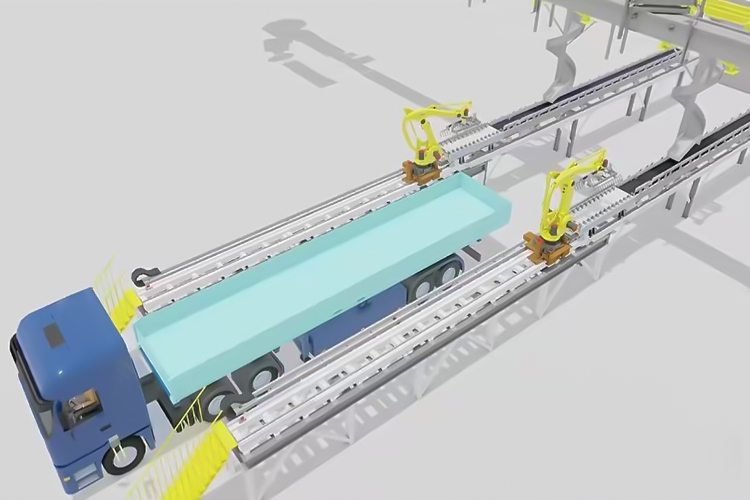
II. Przebieg pracy
1. Załadunek ładunku: Przenośnik transportuje ładunek do stanowiska chwytającego ramienia robota.
2. Pozycjonowanie pojazdu: System wizualny skanuje rozmiar pojazdu i aktualny stan załadunku.
3. Planowanie ścieżki: System oblicza optymalną kolejność chwytania i układania (np. układanie schodkowe w celu zapobiegania zawaleniu się).
4. Chwytanie i umieszczanie: Ramię robota wykonuje załadunek zgodnie z zaplanowaną ścieżką i dostosowuje swoją postawę w czasie rzeczywistym.
5. Informacja zwrotna o zakończeniu: Po załadowaniu system wysyła sygnał i pojazd odjeżdża.
III. Branże, których to dotyczy
1. Cement/materiały budowlane: worki cementu 50 kg, robot 6-osiowy o dużym udźwigu + przyssawka próżniowa, 600–2000 worków/godzinę
2. Nawóz/pasza: worki 25 kg–40 kg, robot o średnim załadunku + chwytak
3. Żywność/napoje/w pudełkach, butelkach: robot BLMC + chwytak |
4. Worki chemiczne/plastikowe/tonowe, beczki: robot bramowy o dużej wytrzymałości + zawiesie
5. System załadunku i rozładunku worków z solą przemysłową
IV. Zalecenia dotyczące wyboru
Środowiska o dużym zapyleniu (np. cementownie): należy wybrać robota odpornego na kurz + system usuwania pyłu.
Ciężkie towary (takie jak worki tonowe): rozważ robota bramowego
Wymagania wysokiej precyzji (np. pojemniki na leki): z systemem wizji 3D o wysokiej rozdzielczości.




