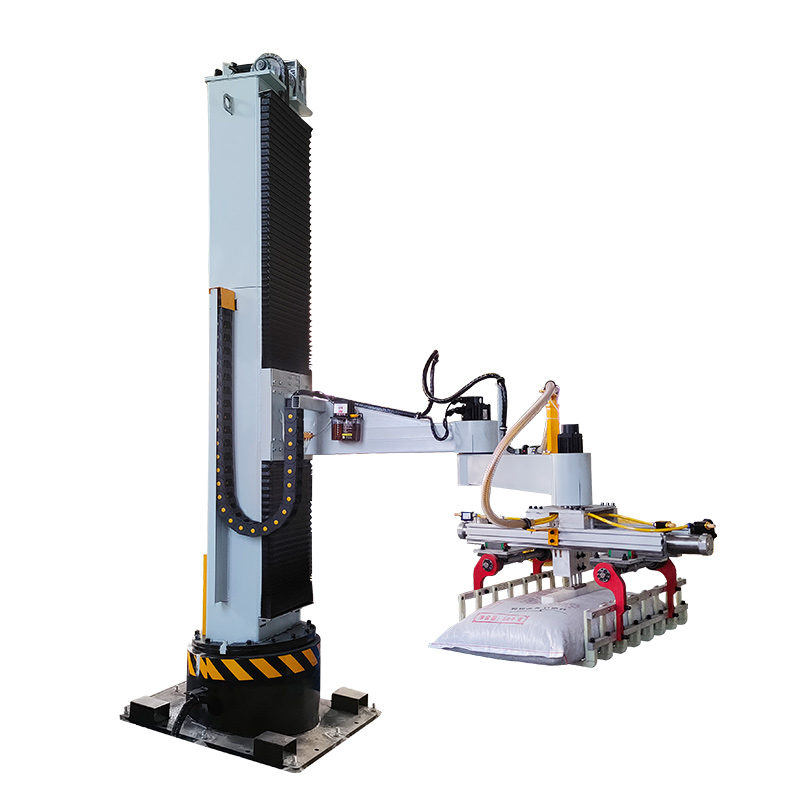


Automatyczny robot kolumnowy
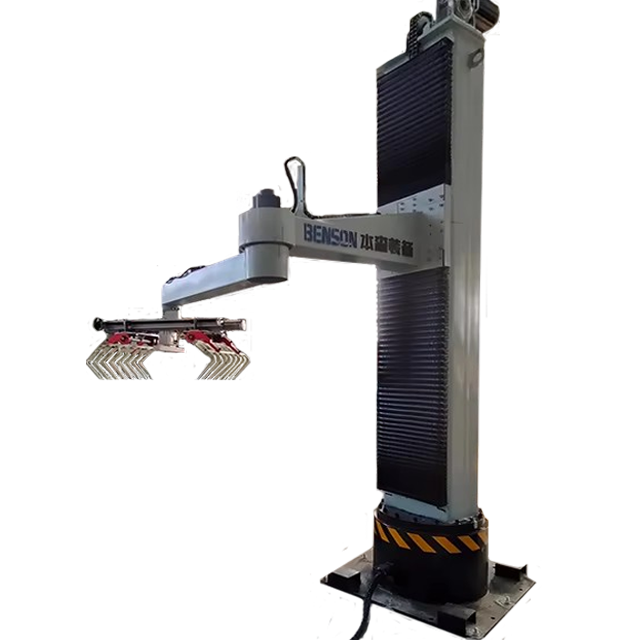
1. Konstrukcja kolumny jest bardziej zwarta, co pozwala efektywnie wykorzystać przestrzeń pionową i zmniejszyć zajmowanie przestrzeni naziemnej.
2. Można go elastycznie konfigurować na różnych liniach produkcyjnych i łatwiej jest koordynować z układem urządzeń peryferyjnych.
3. Dzięki wysoce precyzyjnym serwomotorom, zaawansowanym systemom sterowania i precyzyjnym konstrukcjom mechanicznym można osiągnąć precyzyjne pozycjonowanie i działanie, a materiały można dokładnie chwycić i umieścić.
4. Konstrukcja mechaniczna o wysokiej wytrzymałości i dużej sztywności może wytrzymać duże obciążenia i ciśnienia oraz pozostaje stabilna podczas długotrwałej pracy.
5. Zaprojektowany dla środowisk przemysłowych, może działać stabilnie w trudnych warunkach pracy, takich jak kurz, wilgotność i wysoka temperatura, a także może dostosować się do środowiska produkcyjnego różnych gałęzi przemysłu.
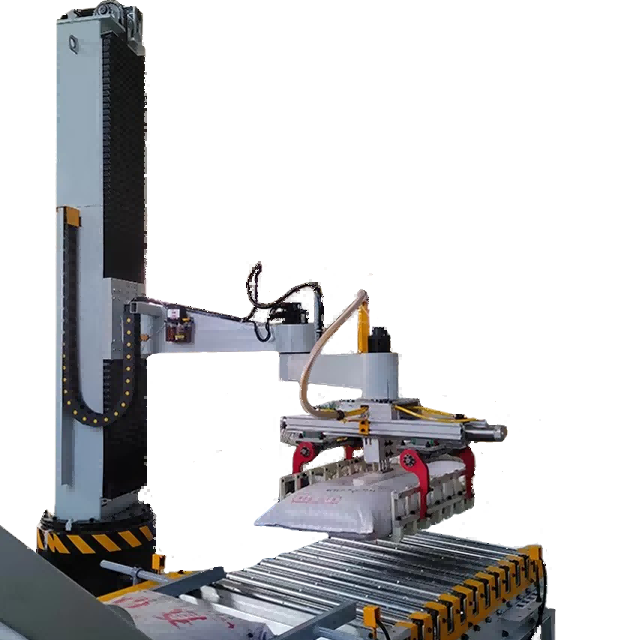
6. Zwykle jako część w pełni zautomatyzowanej linii produkcyjnej można ją płynnie połączyć z innymi urządzeniami, takimi jak maszyny pakujące, przenośniki taśmowe i systemy magazynowania.
Zwykle składa się z pionowych kolumn, ramion, manipulatorów i zacisków ładunkowych. Kolumny pionowe zapewniają robotowi podparcie i stabilność, ramiona łączą kolumny i manipulatory, umożliwiając przemieszczanie się manipulatorów w różnych pozycjach, a manipulatory i zaciski ładunkowe służą do chwytania i umieszczania przedmiotów.

Układ sterowania odpowiada za kierowanie robotem w celu wykonywania różnych czynności. Dzięki wstępnie ustawionym programom lub instrukcjom w czasie rzeczywistym osiąga precyzyjną kontrolę każdej osi robota, aby zapewnić dokładność i stabilność operacji.

System zasilania zazwyczaj wykorzystuje serwomotory jako źródło zasilania zapewniające moc ruchu robota. Ma zalety szybkiej reakcji, wysokiej dokładności sterowania i płynnego działania, umożliwiając robotowi dokładne wykonywanie czynności, takich jak chwytanie i przenoszenie.

Zwykle istnieją 4 stopnie swobody, takie jak oś S, oś Z, oś R, oś T itp. Każda oś może wykonywać ruch w różnych kierunkach, umożliwiając robotowi elastyczną pracę w przestrzeni.

Maksymalne obciążenie wynosi zazwyczaj około 100 kg. Roboty o różnym udźwigu można dobierać w zależności od rzeczywistych potrzeb, aby sprostać wymaganiom przenoszenia przedmiotów o różnej masie.

Maksymalny promień ruchu może sięgać około 1950 mm, co określa zasięg pracy robota i obszar operacyjny. Dokładność powtarzalnego pozycjonowania może sięgać ±0,3 mm, zapewniając dokładność i spójność działania robota.