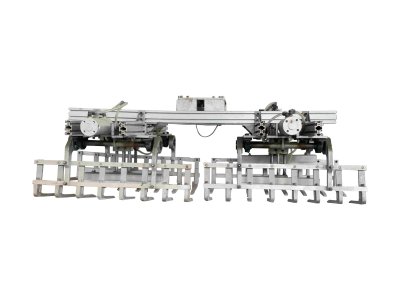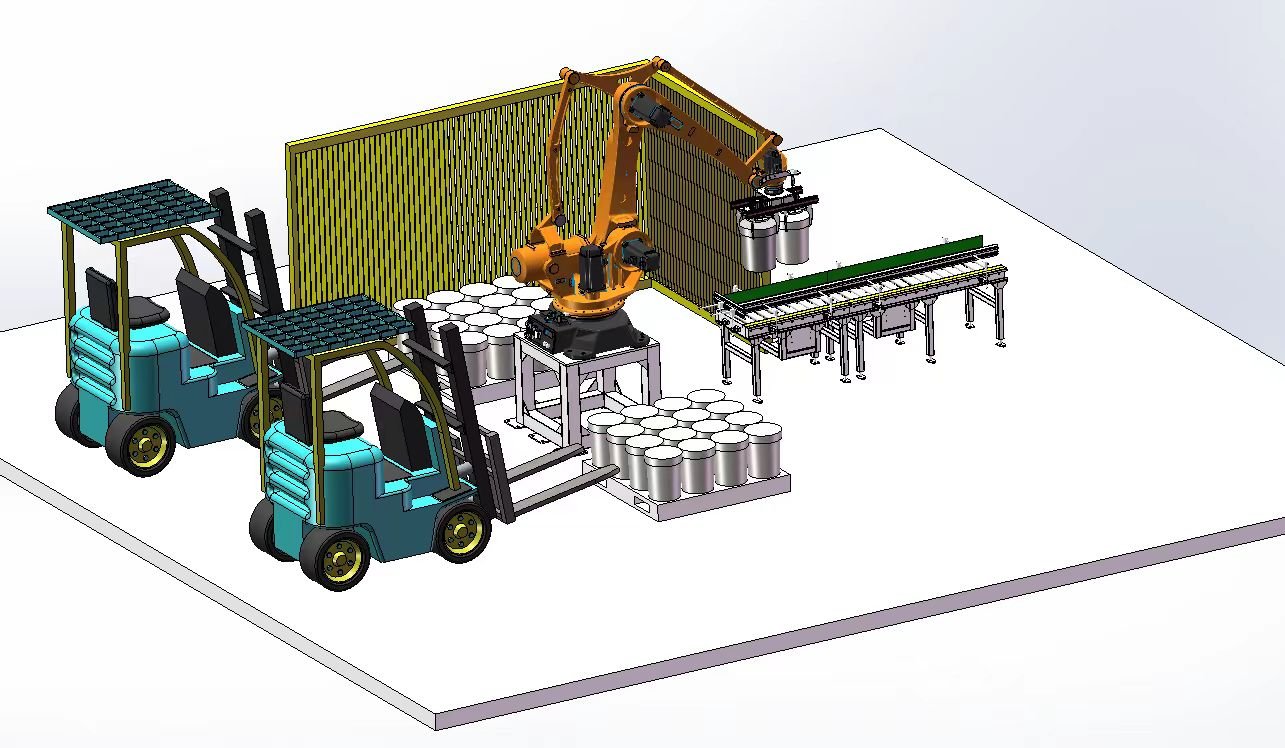



Automatyczny wspólny paletyzator
Maszyna wielostawowa jest podobna do ludzkiego ramienia i charakteryzuje się zdolnością do elastycznego poruszania się, jak ludzka dłoń. Na przykład, napotykając przeszkodę, robot wielostawowy może ją ominąć, aby dotrzeć do celu, co jest trudne dla robota przemysłowego o ogólnym układzie współrzędnych biegunowych lub cylindrycznych. Jeśli wymagane są pewne ruchy specjalne (ruch korbowy), robot wielostawowy jest również łatwiejszy w wykonaniu. Robot wielostawowy może również przemieszczać się z jednego punktu do drugiego w tak krótkim czasie, jak ludzka dłoń. Wyposażony w czujniki dotyku i siły w dłoniach i nadgarstkach robot wielostawowy może wykonywać coraz bardziej złożone prace.
Gdy staw w ramieniu robota wielostawowego obraca się pod kątem, pozostałe stawy i ich korbowody wytwarzają ruch w przestrzeni. W związku z tym pazur osiąga nową pozycję, a kierunek (postawa) pozycji również ulega zmianie. Dlatego ogólny robot wielostawowy musi być sterowany przez komputer. Robot ma detektory kąta na każdym stawie. Biorąc pod uwagę kąt obrotu każdego stawu, problem uzyskania położenia przestrzennego i położenia pazura dłoni nazywa się problemem analizy sterowania ruchem. Z drugiej strony, biorąc pod uwagę położenie i położenie pazura dłoni, problem, o jaki kąt powinien obrócić się każdy korbowód stawu, nazywa się problemem syntezy ruchu. Kluczem do tych problemów jest sposób użycia komputera do przeprowadzenia powyższej transformacji i obliczeń.