
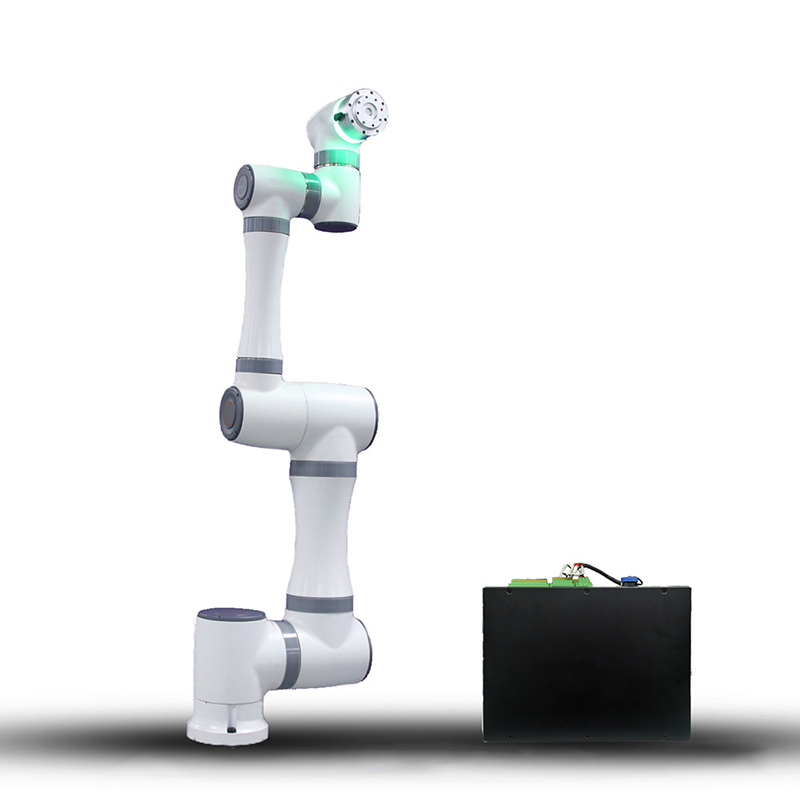



Inteligentne ramię robota współpracującego
1. Wyposażony w precyzyjne czujniki siły, może wykryć siłę kontaktu z ciałem ludzkim lub innymi obiektami w czasie rzeczywistym. .
2. Powierzchnia ramienia robota jest gładka, bez ostrych krawędzi i szczelin, a złącza są zaokrąglone, aby zmniejszyć ryzyko zakleszczenia lub zarysowania operatora podczas kontaktu.
3. Zwykle ma wiele stopni swobody, może osiągać złożone i różnorodne trajektorie ruchu w przestrzeni trójwymiarowej oraz może elastycznie osiągać różne pozycje i kąty.
4. Wykorzystuje lekkie materiały i zwartą konstrukcję, jest lekki i można go łatwo przenosić i instalować. Można go szybko wdrożyć w różnych scenariuszach pracy.
5. Obsługuje tryb programowania nauczania. Operator może ręcznie przeciągnąć ramię robota do docelowej pozycji i postawy, zarejestrować trajektorię ruchu i parametry działania, a ramię robota może automatycznie odtworzyć proces operacji.
Inteligentne ramię robota współpracującego to innowacyjne urządzenie przemysłowe, które łączy w sobie zaawansowaną technologię sztucznej inteligencji, precyzyjną konstrukcję mechaniczną, wykrywanie multimodalne i wydajne funkcje interakcji człowiek-komputer.

Wykonane z lekkich i wytrzymałych materiałów, takich jak stop aluminium o wysokiej wytrzymałości lub włókno węglowe, ramię robota charakteryzuje się dobrą sztywnością, a jego waga jest skutecznie kontrolowana, co zapewnia szybką i elastyczną reakcję ruchu.

Jest wyposażony w szeroką gamę szybko wymiennych efektorów końcowych, które można dostosować do różnych złożonych scenariuszy zadań. Do chwytania i obsługi drobnych części jest wyposażony w precyzyjne chwytaki pneumatyczne lub chwytaki elektryczne, a palce chwytaka są wykonane ze specjalnego elastyczne materiały i adaptacyjny projekt.

Zintegrowany kompleksowy i zaawansowany system wykrywania zapewnia kluczowe wsparcie dla inteligentnej współpracy i precyzyjnego działania. Czujniki siły są szeroko rozmieszczone w przegubach i efektorach końcowych ramienia robota, aby monitorować w czasie rzeczywistym informacje o sile i momencie obrotowym ramienia robota podczas ruchu i pracy.

Dzięki wysokowydajnemu wieloosiowemu kontrolerowi ruchu jako rdzeniowi obsługuje inteligentne algorytmy sterowania zoptymalizowane pod kątem inteligentnej współpracy i wysokiej precyzji działania. Jednocześnie system sterowania obsługuje także różnorodne protokoły i interfejsy komunikacyjne.

Zastosowanie zaawansowanych algorytmów głębokiego uczenia się i technologii widzenia komputerowego umożliwia robotowi inteligentne postrzeganie i rozumienie złożonych środowisk pracy i obsługiwanych obiektów.

W oparciu o algorytmy uczenia się przez wzmacnianie i modele uczenia maszynowego ramię robota może podejmować autonomiczne decyzje i wybierać optymalną strategię działania w różnych scenariuszach zadań.

Opracowano zaawansowany algorytm kontroli zgodności, aby ramię robota mogło wykazywać podatność i elastyczność podobne do ramienia ludzkiego podczas interakcji ze środowiskiem zewnętrznym.

Może być szeroko stosowany w różnych ogniwach produkcyjnych wielu branż, takich jak produkcja elektroniki, produkcja samochodów, sprzęt, magazynowanie logistyczne, edukacja i badania naukowe, a także może dostosować się do różnych typów zadań roboczych i wymagań środowiska produkcyjnego.




